186-9655-0145




TOF30飞行时间相机

产品介绍
光沦科技研发的TOF避障模块,利用TOF三维测距原理,内嵌避障算法,可提供用户进行二次开发。
1. 可实时输出12位深度图像和灰度图像
2.高精度点云输出
3.集成深度图像处理与点云数据处理功能
4.内置微信数据处理与存储
5.多接口连接,可以通过数据线、网络或者WIFI进行实时交互
6. 前端可定制化智能程序
7. 可编程SDK
【特点】高帧率:60fps;车规级:采用符合车规级的芯片;远距离:成像距离超5m;.边缘计算能力(内置 ARM SoC );多种视觉功能SDK
【说明】采用麦立新的光传感器与主处理芯片。搭载850nm波长高功率半导体激光光源。视场范围大,探测距离远
【参数】测量距离(m):0.4-4;测量精度(mm)5mm-1cm;视场角:48°;分辨率:320x240;帧率:60fps;接口:网口
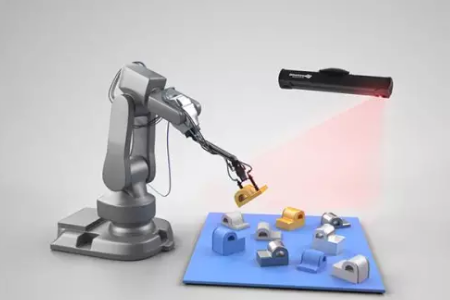
TOF避障模块技术原理
TOF深度摄像头利用光的飞行时间测量距离,能够快速的计算深度信息,进行准确的三维测量,是实现机器人避障和室内定位与导航等应用的新型设备。
工业级飞行时间TOF图像传感器
VCSEL激光光源
4MP RGB摄像头
边缘计算平台(RK3399 ARM SoC)
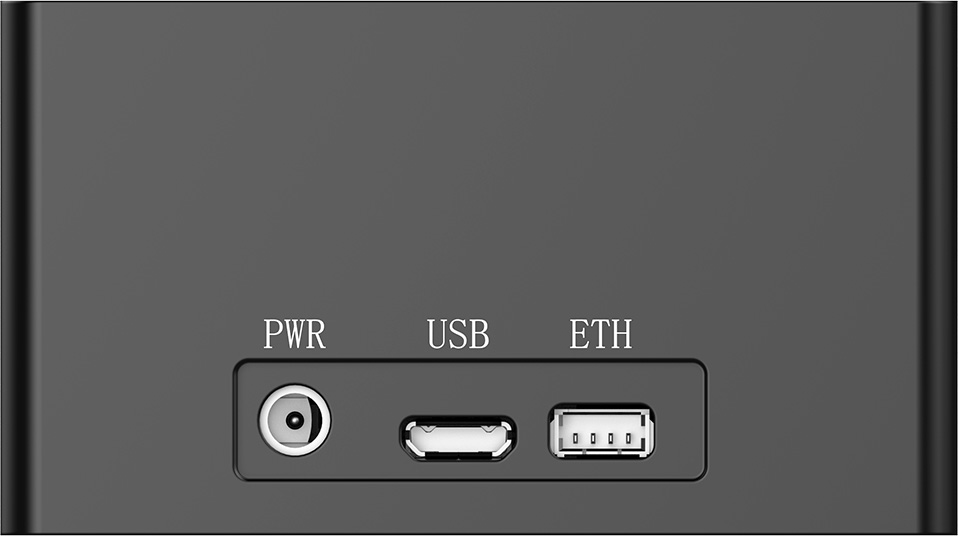
多种标准接口:网口,USB,WIFI,HDMI
相机规格
规格 | 参数 | |
TOF传感器 | Imaging Array | 320 × 240 Array |
Field of view | 74.4°(H) x 59.3°(V) | |
Frame-rate | 12 … 60 fps | |
RGB图像 | Imaging Array | 1920 x 1280,1080 x 720 |
Frame-rate | 30-120fps | |
色彩 | 彩色 | |
Illumination source | wavelength | 850 nm |
功率(W) | 1 or 2 | |
数量(颗) | 4 | |
Operating range | Up to 4 m | |
工作模式 | 多模 | |
系统 | Linux | |
功能 | 深度图像,点云输出,灰度图,体积、距离测量,物体识别,移动侦测等等。 | |
应用场景 | 三维体积测量,空间定位,人脸识别,移动物体侦测与识别、主动避障等 | |
Connectivity | USB 2.0,USB 3.0,HDMI,LAN | |
供电 | Adaptor DC 12V/4A | |
Operating Temperature | 0℃ to 70℃ | |
外壳 | 铝合金 | |
尺寸 | 106mm x 70mm x 51.6mm | |

TOF30飞行时间相机

AST-110主动双目相机

AST-130主动双目相机

DST-300/500结构光相机

机器视觉是什么(什么是机器视觉)

3d机器视觉主要用于什么(应用在哪些场景)
机器视觉是干什么的(什么意思/干嘛的)
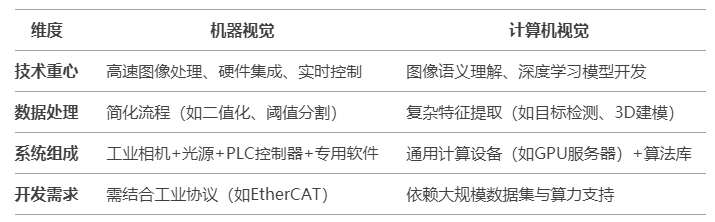
机器视觉和计算机视觉有什么区别
机器视觉系统中,这4种光源的选择要领